Use APKPure App
Get RoboCam old version APK for Android
Za pomocą RoboCam możesz sterować FPV robotem EV3, Android lub Raspberry Pi.
Za pomocą RoboCam możesz sterować FPV własnym robotem LEGO Mindstorms EV3, Android lub Raspberry Pi.
Skrócona instrukcja obsługi (tylko dla osób posiadających zestaw edukacyjny LEGO Mindstorms EV3 (45544)):
1. Złóż Researcher EV3 (instrukcja: https://goo.gl/yPU4sa), włącz go i upewnij się, że Bluetooth działa.
2. Zainstaluj aplikację RoboCam na smartfonie (zwanym dalej telefonem 1).
3. Włącz Bluetooth telefonu 1 i upewnij się, że telefon 1 i EV3 są połączone przez Bluetooth (muszą być sparowane).
4. Połącz telefon 1 i smartfon, którego będziesz używać do sterowania robotem (zwany dalej telefonem 2), do tego samego routera Wi-Fi.
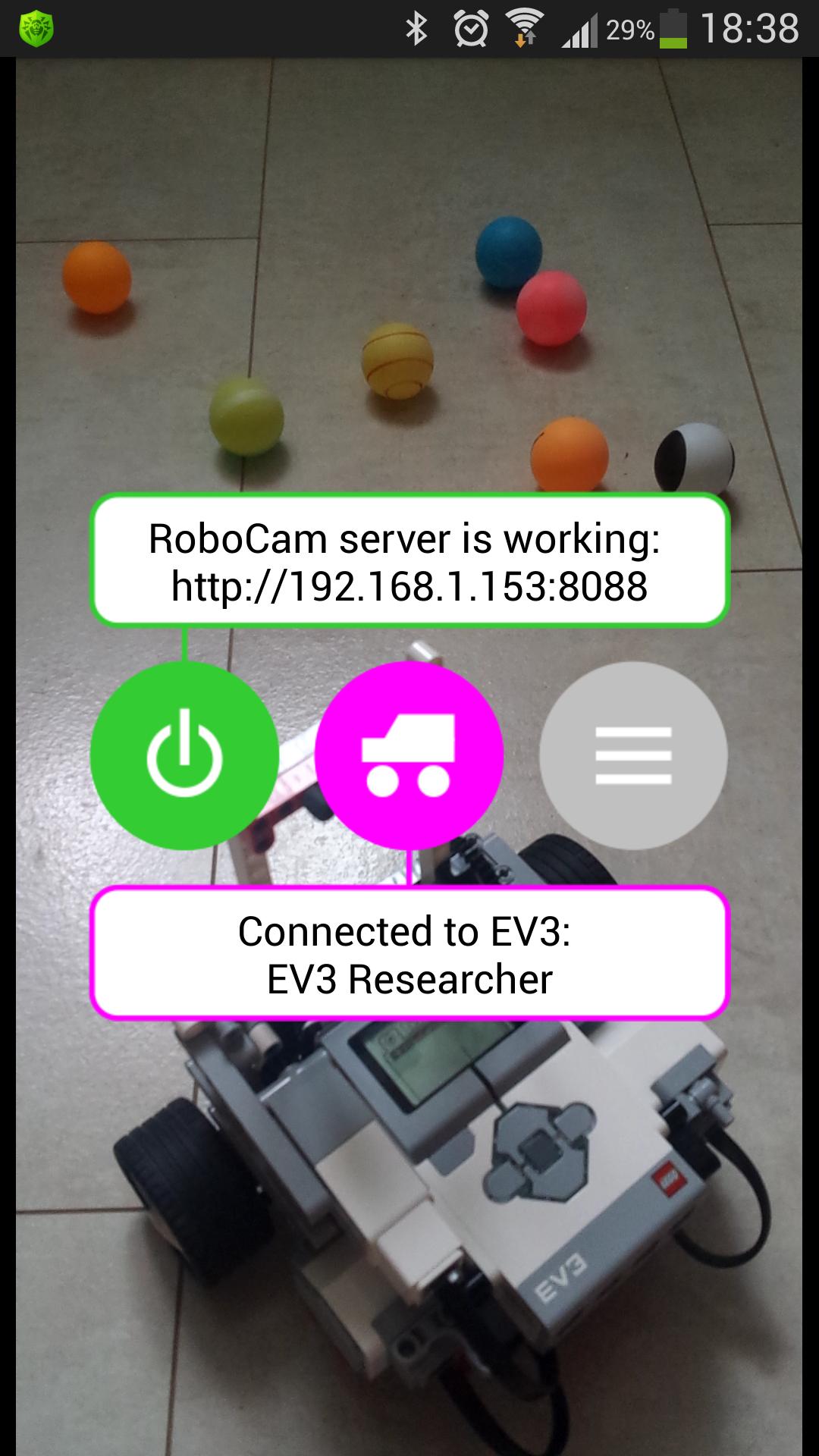
5. Uruchom serwer RoboCam. W tym celu naciśnij lewy zielony przycisk.
6. Podłącz telefon 1 do robota. W tym celu naciśnij przycisk magenta pośrodku.
7. Otwórz Google Chrome na telefonie 2 i przejdź do linku wyświetlanego w aplikacji RoboCam na telefonie 1.
8. Zaloguj się na telefonie 2 (domyślnie użyj admin i 123).
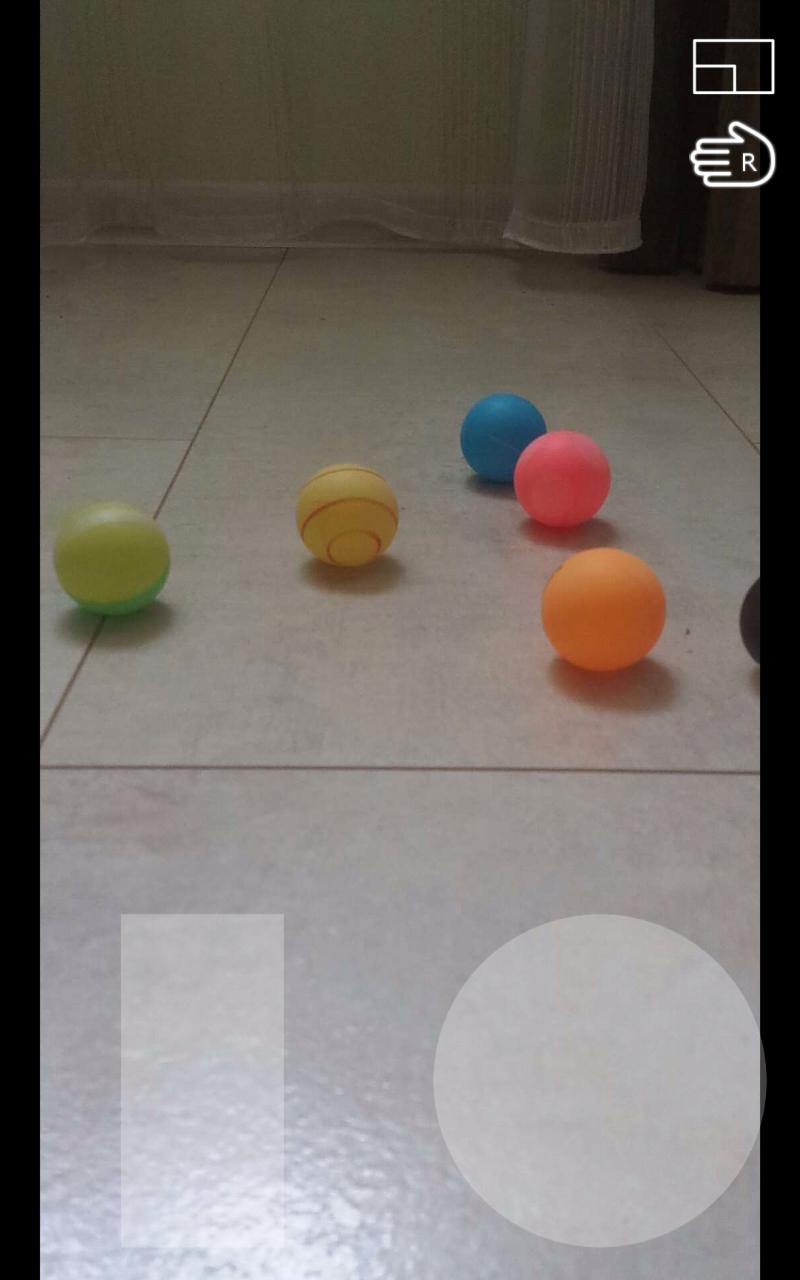
9. Na telefonie 2 pojawiają się dwa joysticki i wideo z kamery telefonu 1. Zablokuj telefon i podłącz go do robota.
10. Teraz możesz sterować swoim robotem przez telefon 2.
Jeśli masz zestaw domowy LEGO Mindstorms EV3 (31313) lub chcesz sterować innym robotem EV3 zamiast Researcher EV3, musisz skonfigurować aplikację RoboCam. Zobacz ustawienia RoboCam.
Aby korzystać z aplikacji, musisz znać dwie rzeczy: jak skonfigurować połączenie i jak działa sterowanie.
To jest szybka instrukcja ustawiania standardowego połączenia. Potrzebujesz: robota EV3, smartfona z Androidem z zainstalowanym RoboCam (dalej zwanego telefonem 1) oraz smartfona lub tabletu (Android, iOS lub Windows) z nowoczesną przeglądarką obsługiwaną przez HTML5 (dalej: telefon 2). Telefon 1 jest podłączony do EV3 przez Bluetooth (urządzenia muszą być sparowane!). Po uruchomieniu serwera RoboCam na telefonie 1 i podłączeniu telefonu 1 i telefonu 2 do tego samego routera WiFi, możesz połączyć się z serwerem RoboCam (do telefonu 1) za pomocą przeglądarki (z telefonu 2). Aby to zrobić, musisz wpisać adres w polu adresu przeglądarki, które będzie widoczne na przykład w RoboCam, http://192.168.1.2:8088
Oto krótki opis tego, jak odbywa się kontrola. Po połączeniu się z serwerem RoboCam przez przeglądarkę telefonu 2 i wejściu do aplikacji internetowej RoboCam zobaczysz wszystko, co widzi kamera telefonu 1. Dołącz telefon 1 do robota, aby jego kamera była skierowana do przodu. Aplikacja internetowa na telefonie 2 może mieć od 1 do 4 joysticków do sterowania robotem w zależności od ustawień. Po dotknięciu joysticka współrzędne punktów dotykowych są przesyłane do aplikacji RoboCam na telefonie 1, a następnie, w zależności od ustawień joysticka, są przekształcane w polecenia silnika EV3 lub wysyłane do skrzynek pocztowych EV3. Jeśli współrzędne są wysyłane do skrzynek pocztowych, musisz napisać dodatkowy program EV3 do ich przetwarzania. Nazwy skrzynek pocztowych są następujące: x i y - joystick 1, w i z - joystick 2, a i b - joystick 3, c i d - joystick 4.
Domyślnie aplikacja ma ustawienie tylko dla jednego robota - „EV3 Researcher”, który można zobaczyć na filmie. Możesz złożyć EV3 Researcher z edukacyjnego zestawu LEGO Mindstorms EV3 (45544). : https://goo.gl/yPU4sa
Last updated on Jan 21, 2018
Version 1.4.4
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.
Ostatnia Wersja
![]() 1.4.4
1.4.4
Przesłane przez
শাহাদাত হোসেন
Wymaga Androida
Android 2.3.2+
Available on
![]()
Kategoria
Raport


Discover what you want easier, faster and safer.

RoboCam
1.4.4 by ProgHouse
Jan 21, 2018