Use APKPure App
Get STEAMXMAKER_BT old version APK for Android
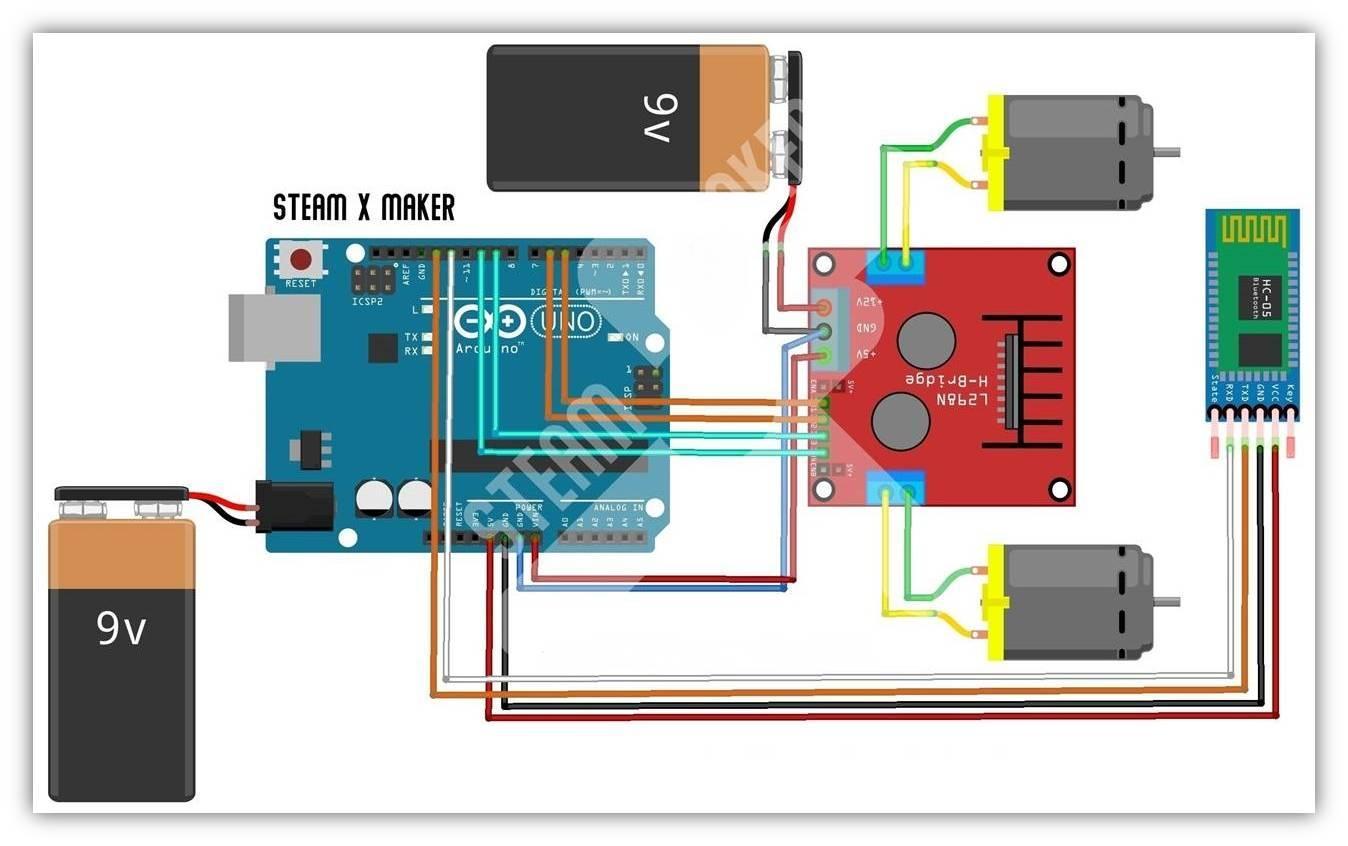
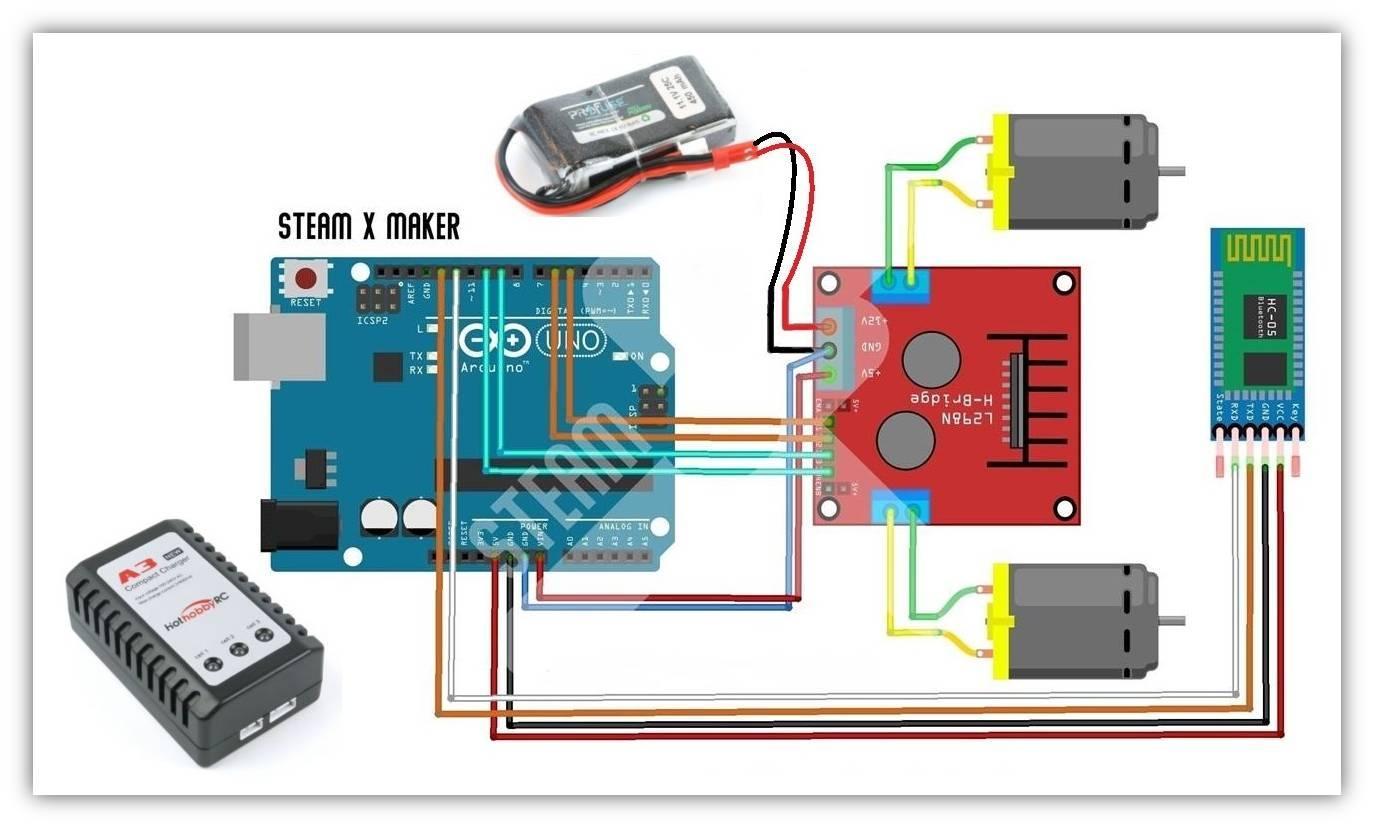
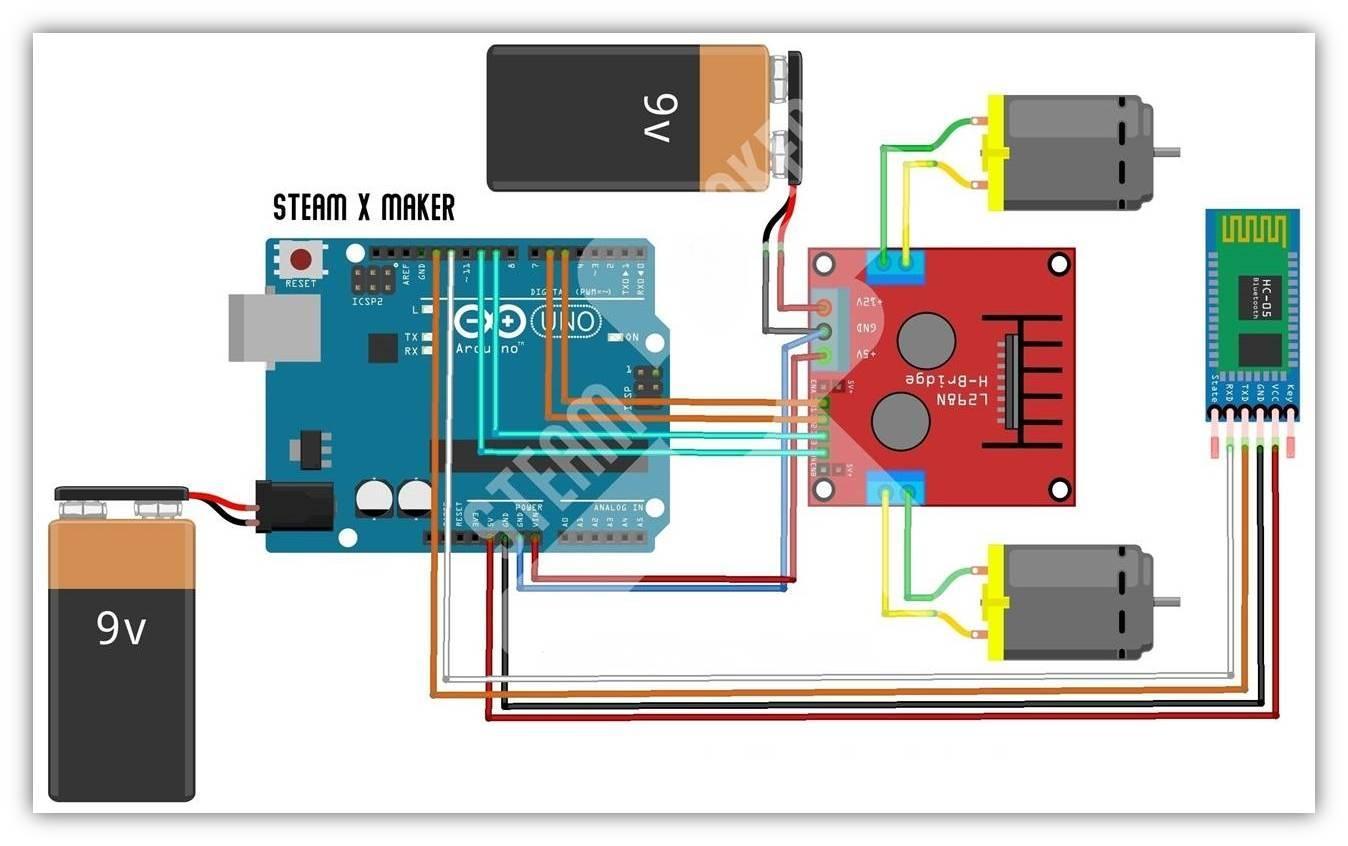
ब्लूटूथ का उपयोग करके अपनी Arduino- आधारित कार को नियंत्रित करें।
आदेश में चरणों का पालन करें
1. आपके द्वारा उपयोग किया जाने वाला फोन या टैबलेट Android आधारित होना चाहिए।
2. Hc05 या Hc06 ब्लूटूथ मॉड्यूल को सक्रिय करने के लिए आवश्यक विद्युत आपूर्ति स्थापित करें।
3. यदि सभी कनेक्शन सही हैं, तो आपके ब्लूटूथ मॉड्यूल पर प्रकाश चालू हो जाएगा और आपका मॉड्यूल सक्रिय हो जाएगा।
4. सबसे पहले, फोन की अपनी सेटिंग्स के माध्यम से ब्लूटूथ मॉड्यूल की खोज करें। आप HC05 या HC06 नाम से आएंगे।
5. अब इस ब्लूटूथ मॉड्यूल को अपने फोन के साथ पेयर करें।
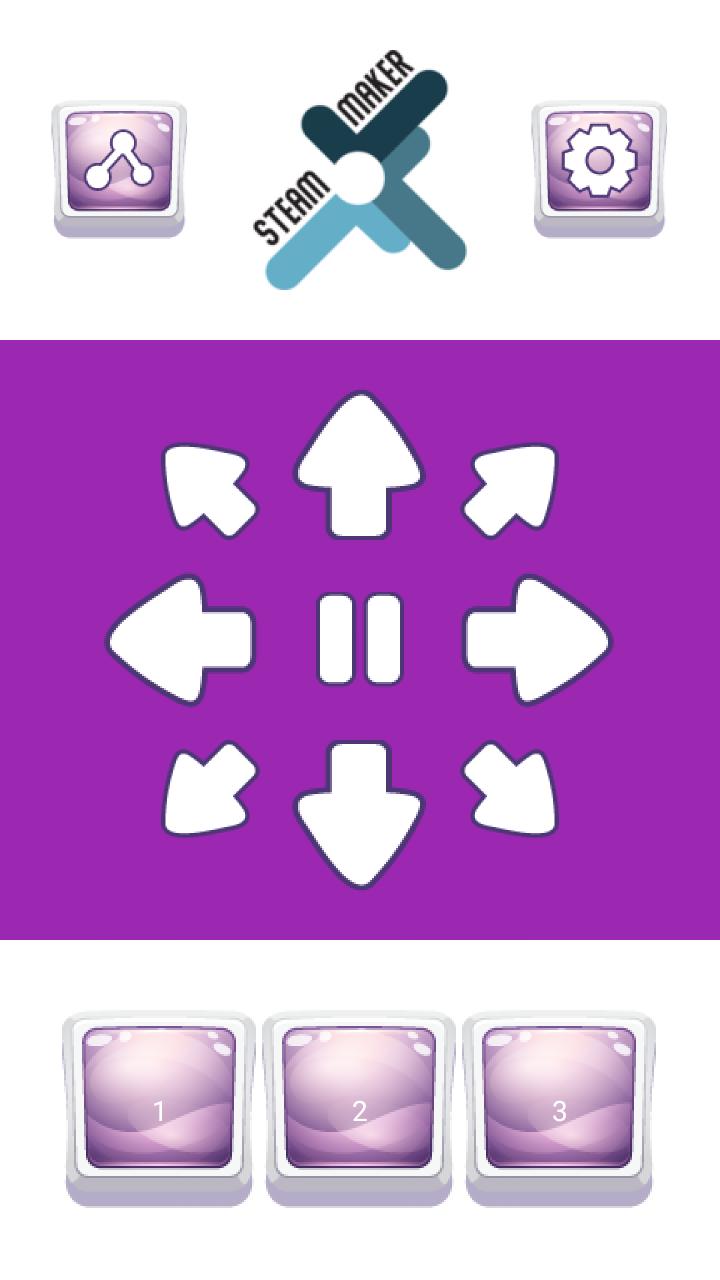
6. अपने फोन पर उतरा ऐप खोलें और कनेक्शन स्थापित करने के लिए ब्लूटूथ अनुमति अनुरोध की पुष्टि करें। आपको स्क्रीन पर Hc05 या Hc06 दिखाई देगा। का चयन करें ...
7. आपके चयन के बाद, आपका एप्लिकेशन आपके मॉड्यूल से मेल खाएगा। (इसलिए पहले आपको फोन के साथ और फिर ऐप के साथ पेयर करना होगा।)
8. जब फोन के साथ ब्लूटूथ पेयरिंग हासिल की जाती है - HC-06 पर लाइट चमकती है -> लगातार चालू होती है।
- HC-05 पर चमकती रोशनी -> लंबे अंतराल पर चमकती है
नोट: आप सींग, हेडलाइट, स्किड आदि जैसी सुविधाओं के लिए आवेदन में बटन 1,2 और 3 को अनुकूलित कर सकते हैं।
अब अपने कोड को संपादित करके अपने काम का परीक्षण करें और आवश्यक समायोजन करें।
#include
SoftwareSerial संचार (13, 12);
// टीएक्स और आरएक्स पिन परिभाषित हैं
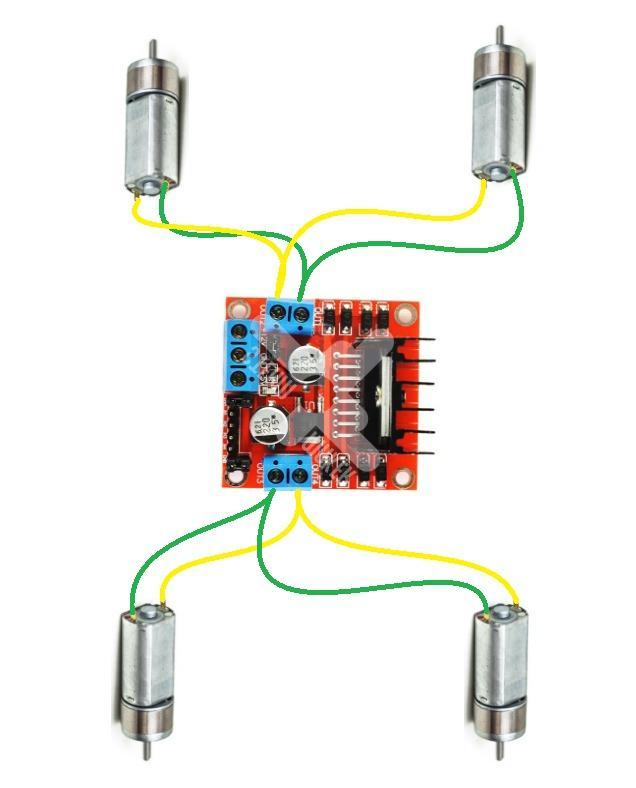
const int IN1 = 5;
const int IN2 = 6;
// L298N बाएं मोटर नियंत्रण कनेक्शन IN1 पिन 5, IN2 से 6 पिन करने के लिए असाइन किए गए हैं
const int IN3 = 9;
const int IN4 = 10;
// L298N को सही मोटर नियंत्रण कनेक्शन IN3 पिन 9, IN4 पिन 10 के साथ सौंपा गया है
स्ट्रिंग पढ़ना;
// ब्लूटूथ डेटा को पढ़ना शुरू किया
शून्य सेटअप ()
{
पिनमोड (IN1, OUTPUT);
पिनमोड (IN2, OUTPUT);
पिनमोड (IN3, OUTPUT);
पिनमोड (IN4, OUTPUT);
// IN1, IN2, IN3 और IN4 पिन को OUTPUT पिन के रूप में सौंपा गया है
iletisim.beg (9600); // ब्लूटूथ संचार शुरू किया
Serial.beg (9600); // सीरियल की निगरानी शुरू
}
शून्य लूप ()
{
जबकि (contact.available) ()
{
देरी (10);
char c = contact.read ();
readString + = c;
}
अगर (readString.length ()> 0)
{
Serial.println (ReadString);
अगर (readString == "STOP")
{
analogWrite (IN1, 0);
analogWrite (IN2, 0);
एनालॉगवर्इट (IN3, 0);
एनालॉगवर्ट (आईएन 4, 0);
}
और अगर (readString == "NEXT")
{
analogWrite (IN1, 0);
analogWrite (IN2, 255);
एनालॉगवर्इट (IN3, 255);
एनालॉगवर्ट (आईएन 4, 0);
}
और अगर (readString == "BACK")
{
analogWrite (IN1, 255);
analogWrite (IN2, 0);
एनालॉगवर्इट (IN3, 0);
analogWrite (IN4, 255);
}
और अगर (readString == "LEFT")
// दाएं पहिए आगे, बाएं पहिए को वापस करना होगा
{
analogWrite (IN1, 255);
analogWrite (IN2, 0);
एनालॉगवर्इट (IN3, 255);
एनालॉगवर्ट (आईएन 4, 0);
}
और अगर (readString == "SAG")
// बाएं पहिये को आगे जाना चाहिए, दाएं पहिए को पीछे की ओर मुड़ना चाहिए
{
analogWrite (IN1, 0);
analogWrite (IN2, 255);
एनालॉगवर्इट (IN3, 0);
analogWrite (IN4, 255);
}
और अगर (readString == "SAGASAGI")
// सभी पहिए पीछे की ओर जाते हैं। लेकिन बाएं पहियों को तेजी से स्पिन करना चाहिए
{
analogWrite (IN1, 255);
analogWrite (IN2, 0);
एनालॉगवर्इट (IN3, 0);
analogWrite (IN4, 125);
}
और अगर (readString == "SOLASAGI") // सभी पहिए पीछे की ओर जाते हैं। लेकिन सही पहियों को तेजी से स्पिन करना चाहिए
{
analogWrite (IN1, 125);
analogWrite (IN2, 0);
एनालॉगवर्इट (IN3, 0);
analogWrite (IN4, 255);
}
और अगर (readString == "UPTACK")
// सभी पहिए आगे बढ़ते हैं। लेकिन बाएं पहियों को तेजी से स्पिन करना चाहिए
{
analogWrite (IN1, 0);
analogWrite (IN2, 255);
एनालॉगवर्ट (आईएन 3, 125);
एनालॉगवर्ट (आईएन 4, 0);
}
और अगर (readString == "LEFT")
// सभी पहिए आगे बढ़ते हैं। लेकिन सही पहियों को तेजी से स्पिन करना चाहिए
{
analogWrite (IN1, 0);
analogWrite (IN2, 124);
एनालॉगवर्इट (IN3, 255);
एनालॉगवर्ट (आईएन 4, 0);
}
readString = "";
// यह ब्लूटूथ के माध्यम से संचार का निरंतर नियंत्रण प्रदान करता है।
}
}
Last updated on May 19, 2023
Minor bug fixes and improvements. Install or update to the newest version to check it out!
नवीनतम संस्करण
![]() 1.0
1.0
द्वारा डाली गई
Ek ShareefZada
Android ज़रूरी है
Android 4.4+
श्रेणी
रिपोर्ट



Discover what you want easier, faster and safer.

STEAMXMAKER_BT
1.0 by Musteren
May 19, 2023