下载 APKPure App
可在安卓获取RTAB-Map的历史版本
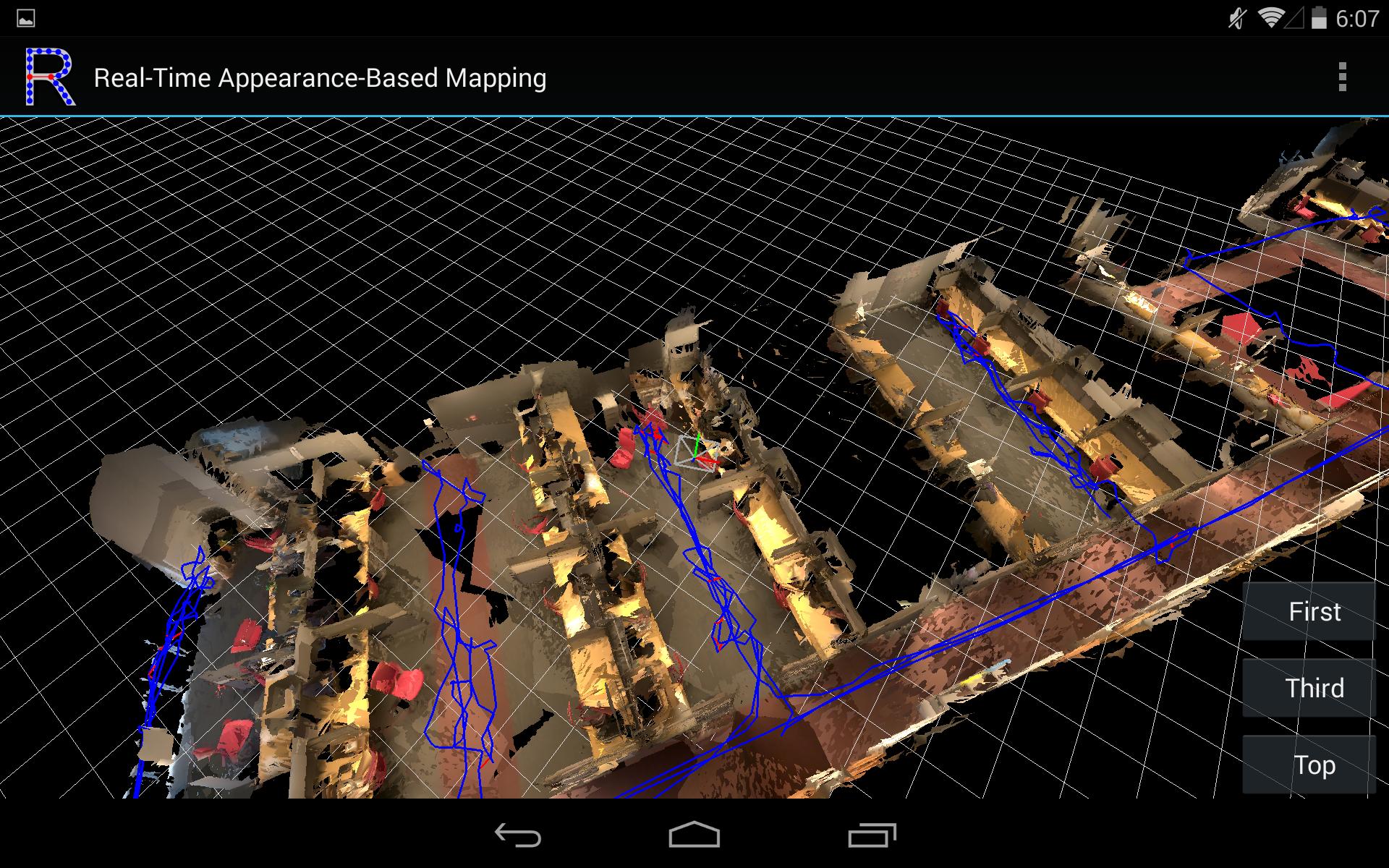
实时外观为基础的绘图
RTAB-MAP(实时外观基础映射)是基于增量外观基础的环路闭合检测器上的基于图形的开源RGB-D SLAM的方法。回路闭合检测器使用一袋字的方法来确定的新形象如何可能来自先前的位置或一个新位置。当环路闭合假设被接受,一个新的约束被添加到地图的图形,那么图形优化的地图最大限度地减少错误。内存管理方法来限制用于环路闭合检测和图形优化地点数量,以便在大型environnements实时约束总是尊重。
在Sketchfab的精选影片这里型号:https://skfb.ly/6nryX
如有问题,请在论坛上或在Github:http://introlab.github.io/rtabmap/#troubleshooting
***它仅适用于Tango项目
特征:
*环境的在线3D扫描/制图
*在线环路闭合检测和校正地图
*保存在数据库格式(RTAB-MAP桌面格式)
*出口在帘布OBJ(带有纹理高达720p)
*多会话映射(保存并在以后继续)
*只有本地化模式(在先前的session)
*轨迹模式,点云,不保存(类似于地区学习)
*后处理选项(例如,使用光束法平差对齐纹理)
*新增“设置 - > Mapping->保存GPS”选项(默认禁用),以节省GPS数据库中的坐标。参见项目网页上的问题#226获取更多信息。
Last updated on 2016年11月24日
- Added "Mapping->Append Mode" option (default true): when resuming, a new map is created only after being localized with the old map.
- Updated with RTAB-Map 0.11.11 and Tango Yildun.
- In third-person view, we can now move virtually the camera with two fingers.
- Added Data Recorder Mode under Mapping options. This can be used to record Tango raw data at higher frame rate without actual mapping.
- Added smoothing mesh post-processing option



RTAB-Map
0.11.11 by Mathieu Labbé
2018年10月24日