Use APKPure App
Get RTAB-Map old version APK for Android
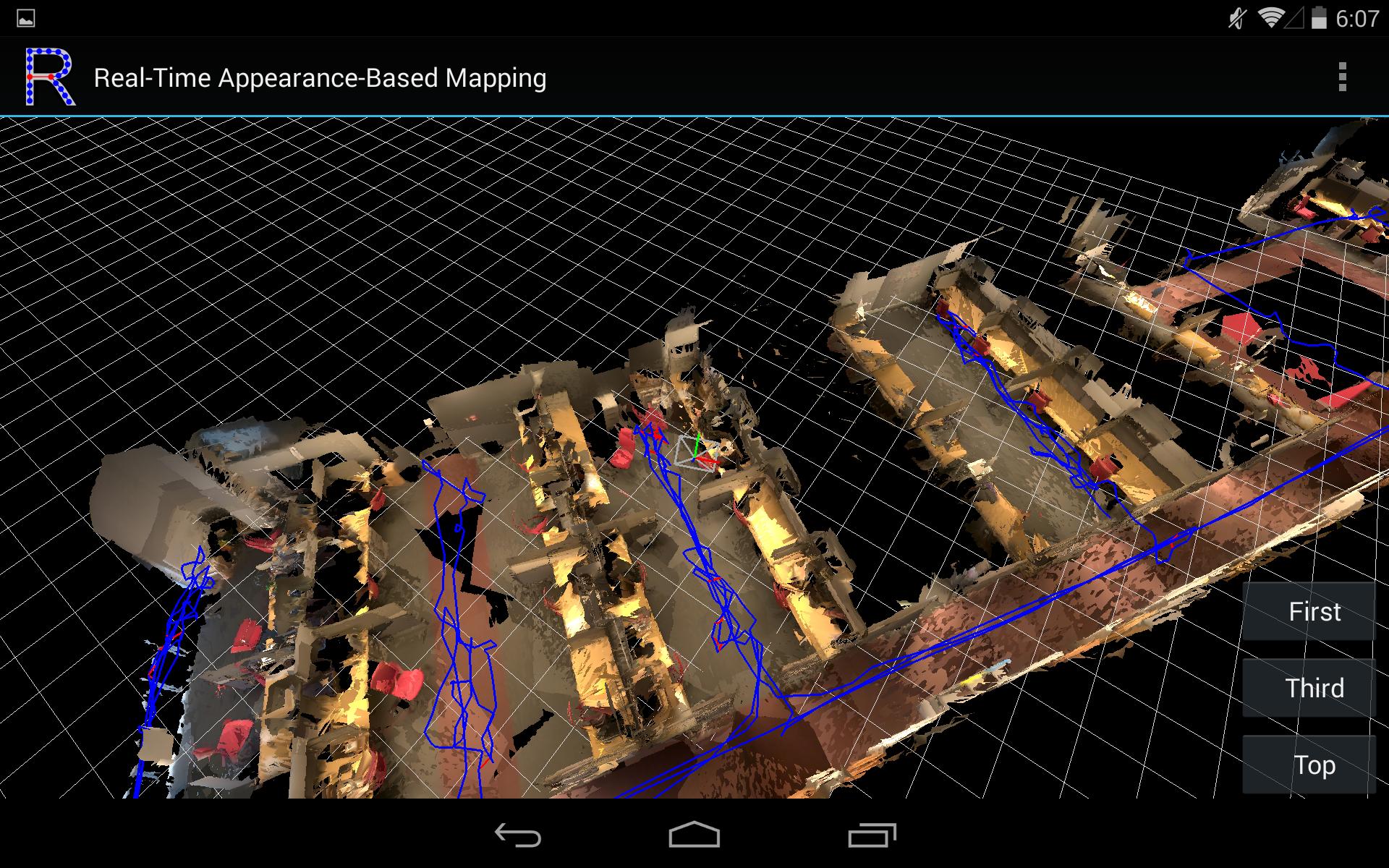
Echtzeit-Aussehen-basierte Mapping
RTAB-Karte (Real-Time erscheinungsbasierte Mapping) ist ein Open-Source-RGB-D Graph-Based SLAM Ansatz basierte auf einem inkrementellen erscheinungsbasierte Schleifenschluss-Detektor. Der Schleifenschließungsdetektor verwendet einen Beutel-of-Worte Ansatz bestimmt, wie wahrscheinlich ein neues Bild von einer früheren Position kommt oder eine neue Position. Wenn ein Schleifenschluss Hypothese akzeptiert wird, ein neues Hindernis für die grafische Darstellung der Karte hinzugefügt wird, dann minimiert ein Graph Optimierer die Fehler in der Karte. Ein Speicher-Management-Ansatz wird verwendet, um die Anzahl der Standorte für Schleifenschluss-Erkennung und grafische Darstellung Optimierung verwendet zu begrenzen, so dass Echtzeitbedingungen auf Groß Environnements werden immer eingehalten.
Modell des vorgestellten Videos auf Sketchfab hier: https://skfb.ly/6nryX
Bei Fragen stellt auf dem Forum oder auf Github: http://introlab.github.io/rtabmap/#troubleshooting
*** Es funktioniert nur auf Project Tango
Eigenschaften:
* Online-3D-Scanning / Kartierung der Umgebung
* Online-Schleifenschließungserkennung und Kartenkorrektur
* Speichern in DB-Format (RTAB-Karte Desktop-Format)
* Export in PLY oder OBJ (mit Texturen zu 720p up)
* Multi-Session-Mapping (weiter unten)
* Der Ort-only-Modus (in einer früheren Sitzung)
* Trajektorie Modus, in dem Punktwolke nicht gespeichert werden (ähnlich Gebiet Learning)
* Post-Verarbeitungsoptionen (beispielsweise verwenden Bundle Adjustment Texturen auszurichten)
* Added "Einstellungen-> Mapping-> Speicher GPS" Option (standardmäßig deaktiviert) GPS-Koordinaten in der Datenbank zu speichern. Siehe Ausgabe # 226 auf der Projektseite für weitere Informationen.
Last updated on Nov 24, 2016
- Added "Mapping->Append Mode" option (default true): when resuming, a new map is created only after being localized with the old map.
- Updated with RTAB-Map 0.11.11 and Tango Yildun.
- In third-person view, we can now move virtually the camera with two fingers.
- Added Data Recorder Mode under Mapping options. This can be used to record Tango raw data at higher frame rate without actual mapping.
- Added smoothing mesh post-processing option
Aktuelle Version
![]() 0.11.11
0.11.11
Von hochgeladen
Melissa Smith
Erforderliche Android-Version
Android 4.2+
Kategorie
Bericht


Discover what you want easier, faster and safer.

RTAB-Map
0.11.11 by Mathieu Labbé
Oct 24, 2018