Use APKPure App
Get RTAB-Map old version APK for Android
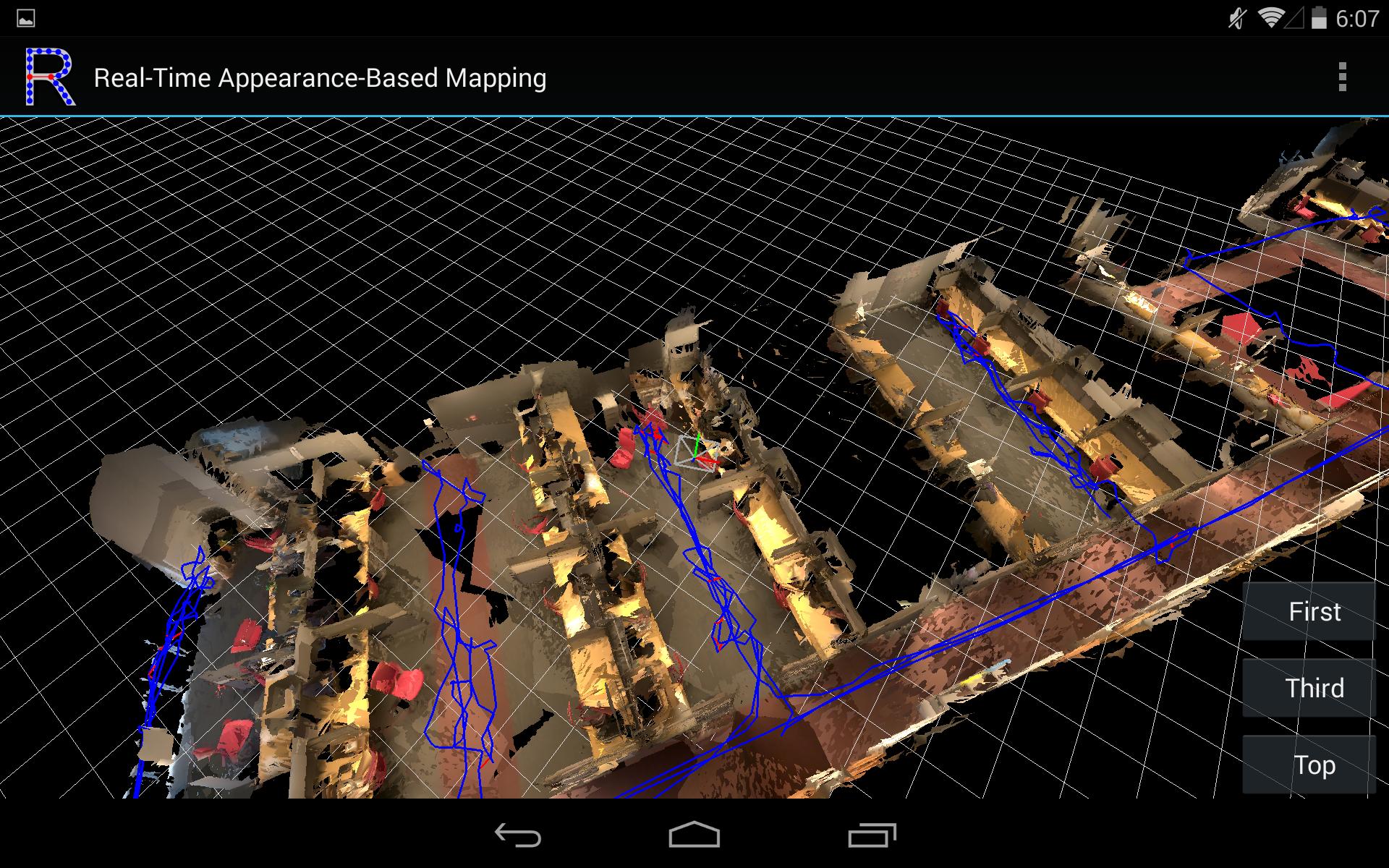
실시간 외관 기반 매핑
RTAB -지도 (실시간 외관 기반 매핑) 증분 등장 기반 루프 폐쇄 검출기를 기반으로 오픈 소스 RGB-D 그래프 기반 SLAM의 접근 방법이다. 루프 폐쇄 검출기는 새 이미지가 이전 위치 또는 새 위치에서 온다 가능성을 따지기 위해 백 - 중 - 단어 접근 방식을 사용합니다. 루프 폐쇄 가설이 승인되면, 새로운 제약 조건이지도의 그래프에 추가 한 다음 그래프 최적화지도의 오류를 최소화 할 수 있습니다. 메모리 관리 방식은 대규모 environnements 실시간 제약은 항상 존중되도록, 루프 폐쇄 감지 및 그래프 최적화를 위해 사용하는 위치의 수를 제한하는 데 사용됩니다.
여기 Sketchfab에 추천 동영상의 모델 : https://skfb.ly/6nryX
질문은 Github에서 포럼에 나에 물어 http://introlab.github.io/rtabmap/#troubleshooting
***이 프로젝트 탱고에서만 작동
풍모:
* 환경의 온라인 3D 스캐닝 / 매핑
* 온라인 루프 폐쇄 감지 및지도 수정
* DB 형식으로 저장 (RTAB-지도 데스크탑 형식)
* PLY 또는 OBJ의 수출이 (720p의에 텍스처 위로)
* 멀티 세션 매핑 (저장하고 나중에 계속)
(이전 세션에서) * 현지화 전용 모드
점 구름 (지역 학습과 유사한) 저장되지 않습니다 * 궤적 모드
* 후 처리 옵션 (예를 들어, 텍스처 정렬 번들 조정 사용)
* 추가 "설정 -> Mapping-> 저장 GPS"옵션은 GPS가 데이터베이스에 좌표를 저장 (기본값은 비활성화). 추가 정보를 원하시면 프로젝트의 페이지에 문제 번호 (226)를 참조하십시오.
Last updated on Nov 24, 2016
- Added "Mapping->Append Mode" option (default true): when resuming, a new map is created only after being localized with the old map.
- Updated with RTAB-Map 0.11.11 and Tango Yildun.
- In third-person view, we can now move virtually the camera with two fingers.
- Added Data Recorder Mode under Mapping options. This can be used to record Tango raw data at higher frame rate without actual mapping.
- Added smoothing mesh post-processing option


Discover what you want easier, faster and safer.

RTAB-Map
0.11.11 by Mathieu Labbé
Oct 24, 2018